Zerspanen - Fräsen, Bohren, Schleifen, Entgraten
Überblick
Roboter zum mechanischen Bearbeiten / Zerspanen, wie
Fräsen, Bohren, Reiben, Schlichten, Entgraten
Seit Jahrzehnten werden Yaskawa Motoman-Roboter erfolgreich für zerspanende Verfahren eingesetzt, wie Fräsen, Bohren, Reiben oder Entgraten. MOTOMAN-Roboter sind die beste Wahl für das Fräsen, Bohren, Reiben oder Entgraten, weil sie die erforderliche Kombination aus industrieller Steifigkeit, Steifigkeit, Empfindlichkeit und staub- bzw. flüssigkeitsdichter Konstruktion mitbringen. Und das in rauer Umgebung - mit unvorhersehbar auftretenden äußeren Kräften, Vibrationen, Staub, Spänen, Flüssigkeiten und allen Arten von anspruchsvollen Werkstückgeometrien.
Für die zerspanende Bearbeitung sind unsere Roboter der GP-Serie am besten geeignet, sie bieten die eine gute Balance aus Steifigkeit und Reichweite. Bei größeren Werkstücken und zur Erweiterung des Bewegungsbereichs ist es eher sinnvoll, den Roboter auf eine Fahrbahn zu setzen, anstatt ein Robotermodell mit besonders langem Arm einzusetzen. YASKAWA-Steuerungen besitzen einen sehr kurzen Interpolationstakt und sind daher bekannt für ihre ausgezeichnete regelungstechnische Bahnperformance - seiMotoman Roboter generieren über einen breiten Aktionsradius hinweg klassenbeste gerade und kreisförmige Bewegungen.
Planungswerkzeuge für das Layout von Roboterzellen - MotoSim
Viele Fräs- und Schleifaufgaben erfordern mehrere Bearbeitungsschritte mit unterschiedlichen Werkzeugen - Fräsen und Entgraten, Schleifen und Polieren, Schleifsequenzen mit unterschiedlichen Korngrößen usw.
Wenn der Roboter die Werkzeugspindel tragen soll, kann man mit Mehrspindelwerkzeugen oder Werkzeug-Wechselsystemen arbeiten. Oder man lässt den Roboter die Werkstücke handhaben und an verschiedene stationär angeordnete Werkzeuge bewegen. Jede Anwendung erfordert ein gewisses Maß an Engineering, um den richtigen Aufbau des Zellendesigns und die optimale Roboterposition zu definieren. Erfahrene Anwendungsingenieure von Yaskawa Motoman helfen Ihnen bei der Konzept-Erarbeitung für Ihr Projekt, oft mit Hilfe unserer Engineering-Tools wie MotoSim. MotoSim bietet auch eine CAM-Funktion, die Roboterbahnen generieren kann.
CAD/CAM Engineering Tools für die Roboter-Bahngenerierung (CAD-to-Path)
Beim Zerspanen wird häufig mit CAD/CAM-Simulationssoftware programmiert. Diese übernehmen die Werkzeugkontur aus den CAD-Daten, erzeugen daraus Roboterbahnen, und übermitteln diese über eine G-Code-Standardschnittstelle an den Roboter. Sie finden Motoman-Roboter in den Bibliotheken aller gängigen CAD/CAM-Softwarewerkzeuge von Drittanbietern, die auf dem Markt erhältlich sind.
Kraft-/Momentenregelung beim Zerspanen
Um einen konstanten Oberflächendruck auf konturierte Produkte zu gewährleisten, wird die Anpresskraft des Roboters auf das Werkstück manchmal über einen Kraft-/Momentensensor geregelt, der entweder am Handgelenk montiert wird (MotoFit) oder direkt im Fräswerkzeug integriert ist. Manchmal können Vision-Systeme zur Führung des Roboters oder zur Qualitätsprüfung eingesetzt werden. Für unsere FS100/YRC1000-Robotersteuerungen sind alle Arten digitaler, analoger und Feldbus-Sensor-Schnittstellenoptionen verfügbar, um sicherzustellen, dass der erforderliche hochfrequente Signalaustausch zur Steuerung und Regelung des Prozesses vorhanden ist.
Fräsen mit Motoman-Robotern
Im Vergleich zu stationären CNC-gesteuerten 5-Achsen-Fräsmaschinen, die steif genug sind, um alle Arten von Stahlwerkstücken zu zerspanen, eignet sich die naturgemäß nicht so steife kinematische 6-Achsen-Struktur eines Industrieroboters nur für Stahlwerkstücke mit dünnen Wandstärken (z.B. Rohrausschnitte) oder für weichere Materialien wie Aluminium (z.B. Leitern, Handläufe, Gerüstelemente), Sand (Sandformen), Holz (Möbel), Polystyrol (Prototyping) und allen Arten von Kunststoffen, z.B. für die 3D-Formgebung von industriellen oder orthopädischen Produkten.
Das breite Motoman-Roboterportfolio der GP-Serie hilft Ihnen, den richtigen Kompromiss der Roboterarmlänge zu finden - ein kurzer Arm ist gut für die Stabilität, ein langer Arm ist gut für große Werkstücke, deckenmontierte Roboteranordnungen können ein guter Kompromiss sein, um eine maximale Reichweite auf einem Tisch zu erreichen.
Auch hier ist es eine gute Idee zu prüfen, ob der Roboter nicht besser das Werkstück anstelle der Werkzeugspindel bewegen sollte. Für Umgebungen mit hoher Beanspruchung (z.B. Schleifstaub oder permanente Belastung durch aggressive Kühlflüssigkeiten) sind Motoman-Robotervarrianten mit hoher Schutzklasse IP65/67 und/oder speziellen Antikorrosionsbeschichtungen (GP-ACC-Serie) am besten geeignet.
Falls Sie einen Maschinenpark von stationären CNC-Fräsmaschinen betreiben und diese automatisieren wollen, ziehen Sie bitte den Einsatz von Robotern für die Automatisierung der Maschinenbeschickung (Laden/Entladen von Teilen von/zur Maschine) in Betracht.
Motoman-Roboter zum Fräsen von Steinen
Grabsteingravuren, Granitsteinbeschnitte - dafür sind Motoman-Roboter am besten geeignet.
Motoman-Roboter bei der Bearbeitung von hartem Stahl
Das Bearbeiten von Stahl ist mit dem Roboter möglich, allerdings müssen die Prozessparameter sorgfältig abgestimmt werden, um Vibrationen zu und zu hohe Vorschubkräfte zu vermeiden.
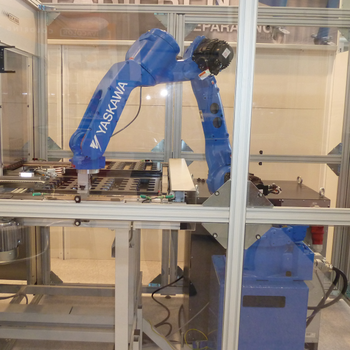
Motoman-Roboter beim Fräsen von Aluminium
Zum Fräsen von Aluminium-Werkstücken sind Motoman Roboter am besten geeignet. Im folgenden Anwendungsbeispiel bewegt der Roboter das Werkstück um ein stationäres Werkzeug.
Motoman-Roboter fräsen Korkmaterial
Je weicher der Werkstoff, desto besser kommen Motoman-Roboter damit zurecht, und erreichen ein hervorragendes Finish für präzise geformte 3D-Objekte aus Korkmaterial.
Motoman-Roboter fräsen Schaumstoffe und Styropor
Im Formenbau sowie zum individuellen Ausfräsen von Styroporteilen für Verpackungen eignen sich Motoman-Roboter am besten.
Werkstückhandling an einer stationären Fräsmaschine
Entgraten und Anfasen mit spanenden Werkzeugen und Motoman-Robotern
Viele Unternehmen haben Probleme, Mitarbeiter für Entgratungsarbeiten zu finden, die als trivial und langweilig angesehen werden. Entgratungsarbeiten erfordern Ausdauer, Gewissenhaftigkeit und Präzision - ein perfekter Ausgangspunkt, um über robotergestützte Automatisierung nachzudenken!
Zum automatischen Entgraten von bearbeiteten CNC-Teilen sind alle Motoman der GP-Serie am besten geeignet, ausgewählt nach Nutzlast und Reichweite für die Größe Ihres Werkstücks. Viele Hersteller von CNC-Werkstücken kombinieren das robotergestützte Be-/Entladen der Werkzeugmaschine mit Entgrat- und Inspektionsaufgaben, während der CNC-Bearbeitungszyklus läuft. Die kinematische Vielseitigkeit und die hervorragende Bahngenauigkeit unserer 6-Achsen-Roboter der GP-Serie ermöglichen das Entgraten von Werkstücken mit komplexen Geometrien.
Einige Entgratanwendungen erfordern eine Kraftregelung oder eine maschinelle Bildverarbeitung, z.B. wenn Sie undefinierte Gußformteil-Reste zu entfernen haben. Große und schwere Werkstücke können einfach auf Paletten liegen bleiben, und ein 2D- oder 3D-Bildverarbeitungssystem (Motosight2D) kann dem Roboter die korrekte Bauteilposition mitteilen. Noch anspruchsvollere Lösungen verwenden Bildverarbeitungstechnologie zur Erkennung und Behandlung von Graten zufälliger Größe.
Das robotergestützte Entgraten von Kunststoffteilen - z.B. nach Spritzgussprozessen - ist sehr effektiv, um eine konstante und hohe Qualität zu erreichen, z.B. bei Automobil-Innenverkleidungen. Motoman-Roboter sind am besten geeignet für alle Entgrataufgaben.
Bohren und Reiben mit Motoman-Robotern
Im Vergleich mit stationären Bohrmaschinen sind Roboter aufgrund ihrer naturgemäß schlechteren Bahngenauigkeit der kinematischen Kette - je nach Pose - eher für kurze Bohrlängen geeignet. Automatisiertes Bohren und anschließendes Entfernen von Spänen oder CNC-Bearbeitungsrückständen mit Robotern ist jedoch sehr effizient und einfacher als Sie denken...